Welding Robot
Project Assignment: Dual-Robot Coordination for Automated Welding in ABB RobotStudio
Project Information
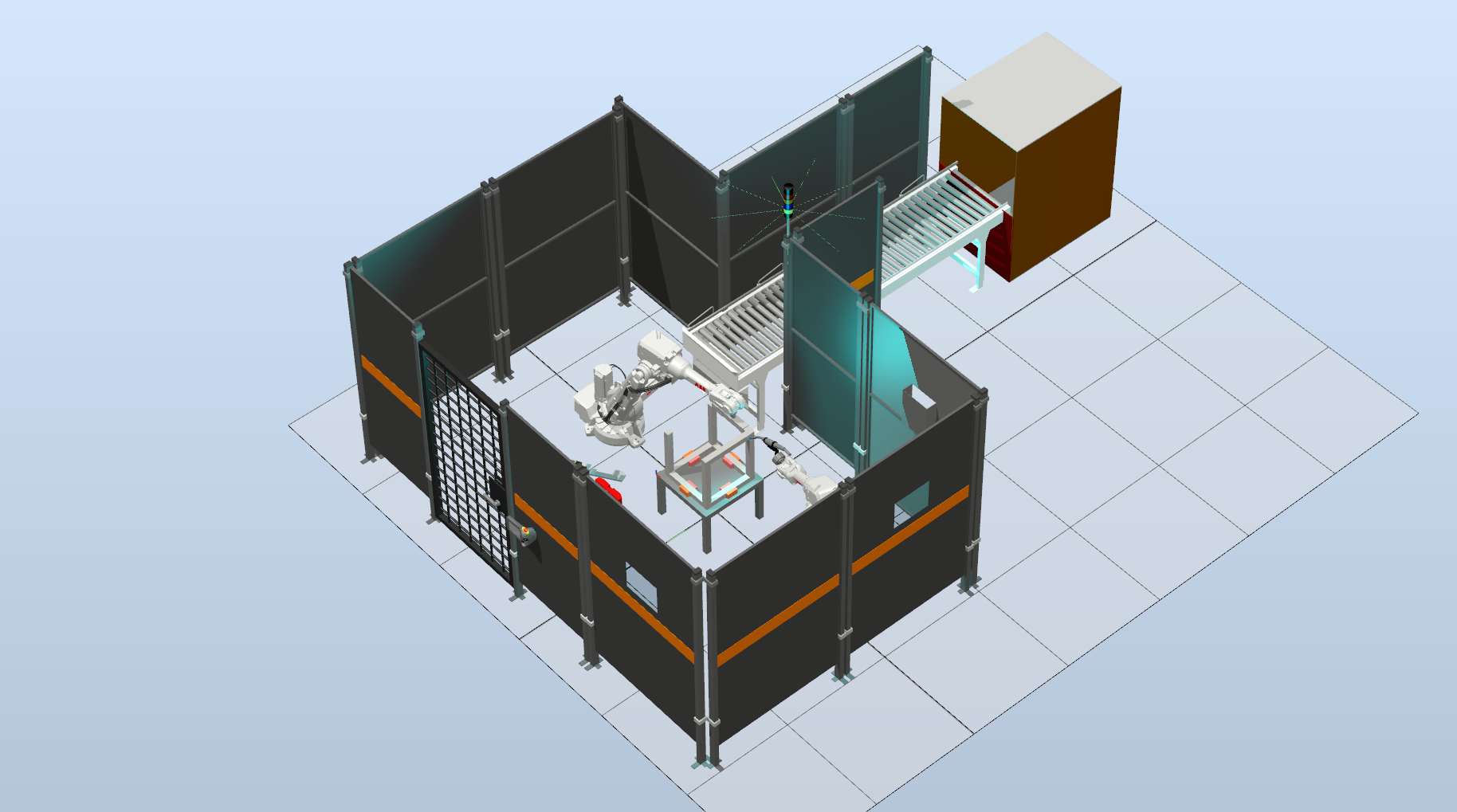
The objective of this project was to design and implement a coordinated dual-robot system within ABB RobotStudio to perform an automated welding task. The system involved the integration of two industrial robots, each assigned a specific role to accomplish a collaborative operation.
The first robot was programmed to pick up and accurately position a metal bar, maintaining it in a stable orientation throughout the process. Simultaneously, the second robot executed a precise welding operation along a predefined seam on the bar. The task required careful synchronization of both robotic arms to ensure operational safety, spatial accuracy, and process efficiency.
Key aspects of the project included multi-robot programming, tool path planning, spatial coordination, and collision avoidance within a shared workcell. This assignment provided practical experience in robotic system integration and highlighted the complexities of collaborative automation in industrial manufacturing environments.
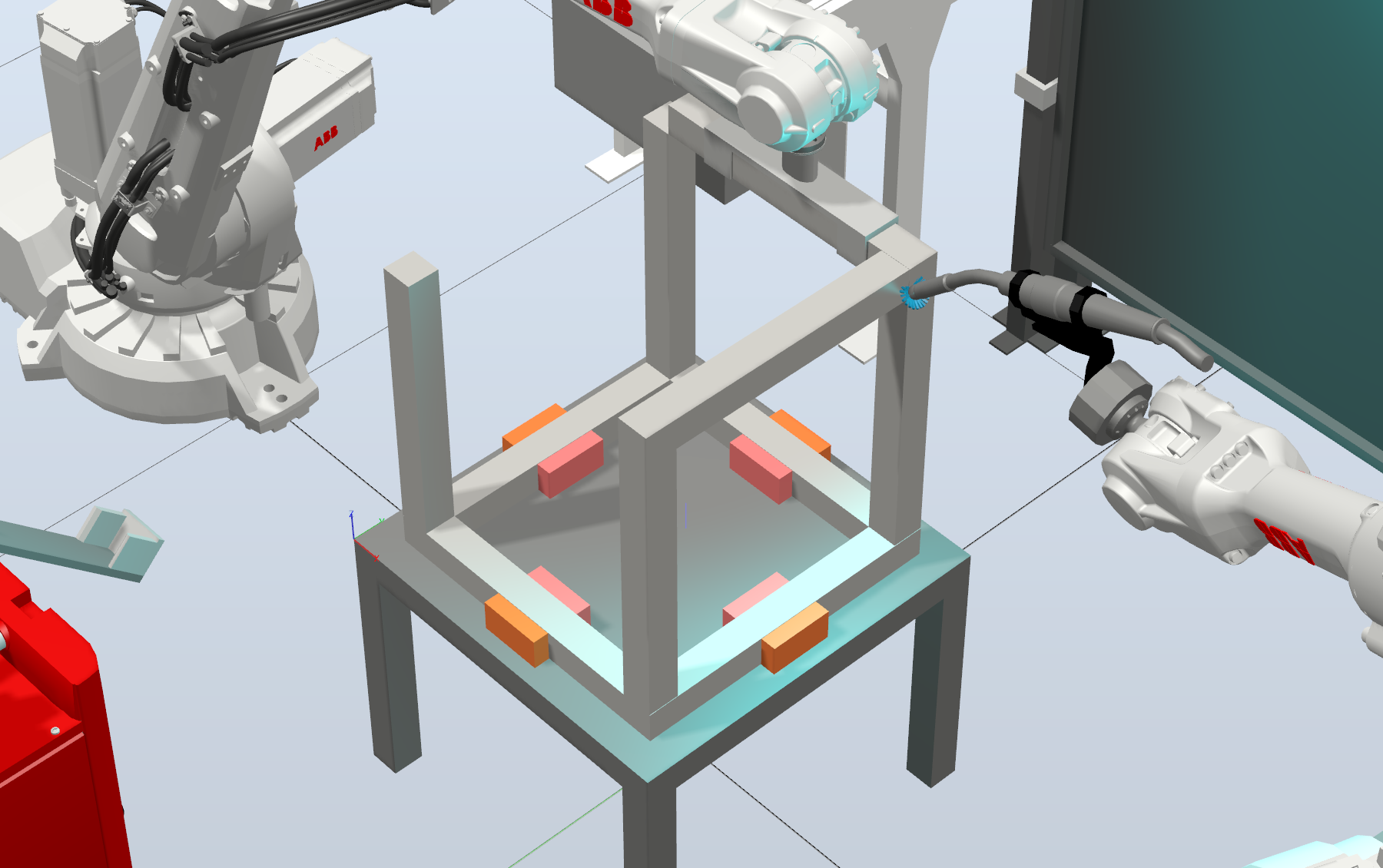
The welding robot performs the weldin task while the other robot holds the bar in place.
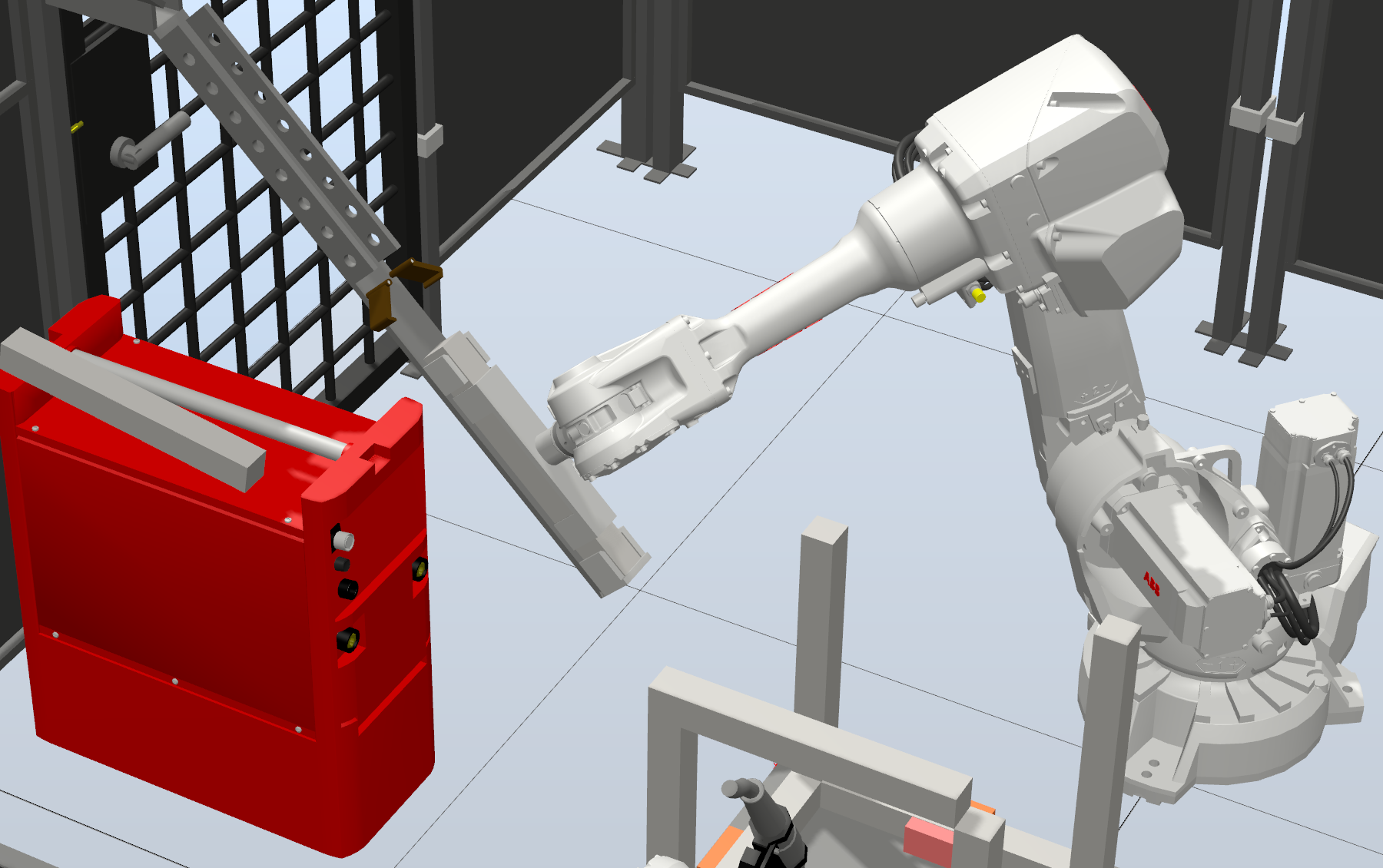
New bars are introduced in a slider using the physics engine. The gate controls when a new bar is fed down to the robot.
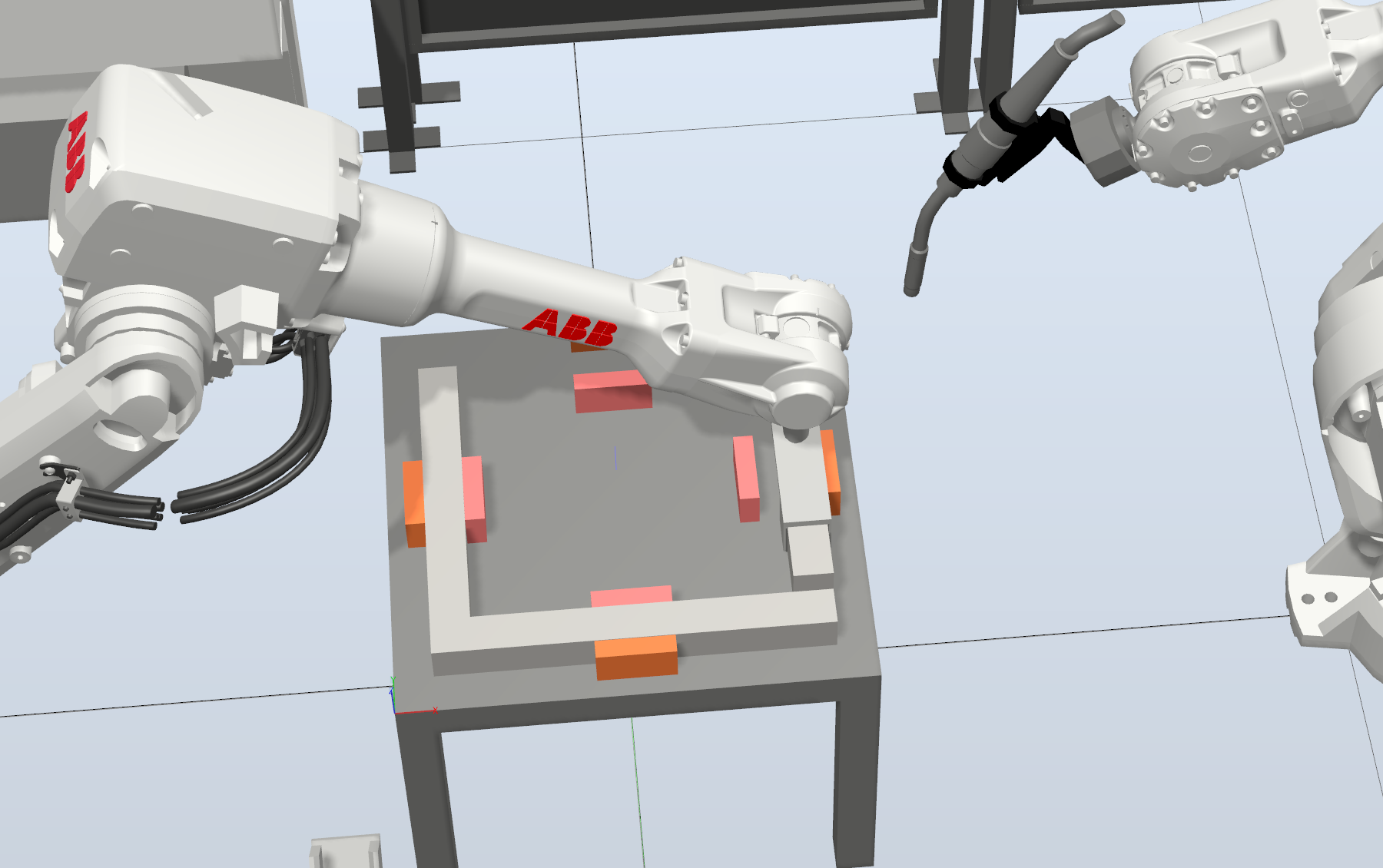
Clamps in the table are used to align the bottom frame correctly and ensure that it doesn't move during the process.
Project Details
| Project Name | Welding Robot |
|---|---|
| Purpose | Assignment project requiring two robots to collaborate with welding a frame of bars. |
| Tech Stack |
|
| Main Features |
|
| Development Time | ~1 Month |
| Project Type |
|
| Status | Completed |